人形机器人开发观察:如何搞定全身40+关节的亚毫秒级同步控制?
摘要
随着人形机器人从实验室走向落地,其运动控制系统的复杂度呈指数级上升。面对脊柱、四肢及末端执行器总计超过30-40个伺服轴的协同需求,传统的控制方案往往面临抖动大、同步性差的问题。
本文将从EtherCAT总线技术角度,探讨如何利用分布式时钟(DC)机制与软件运动控制库(Soft Motion),在嵌入式平台上实现亚毫秒级的确定性控制。
一、行业痛点:当关节数量突破40个
人形机器人(Humanoid Robots)与传统工业机器人的最大区别在于其自由度(DoF)的激增。一个典型的人形机器人,为了实现自然的行走、平衡保持以及灵巧手操作,往往集成数十个伺服驱动器。
在工程落地中,开发者面临的核心挑战是:如何在一个控制周期内(通常 < 1ms)完成所有关节的数据交换与指令下发,并保证所有关节动作的严格同步?
如果底层通讯存在微秒级的抖动(Jitter),传递到末端执行器时,可能会被物理放大成肉眼可见的颤动,甚至导致动态平衡算法失效,让机器人“摔跟头”。因此,确定性(Determinism)和超低延迟(Ultra-low-latency)是人形机器人“小脑”开发的硬指标。
二、底层解法:EtherCAT分布式时钟 (DC) 的深度应用
在多轴同步领域,EtherCAT凭借其“飞射传输(On-the-fly)”机制成为了行业标准。但要在人形机器人上发挥其极致性能,必须深度利用分布式时钟(Distributed Clocks, DC)机制。
1、消除传输延迟
在传统的串行通讯中,数据包到达第一个关节和最后一个关节存在物理时间差。EtherCAT DC机制通过硬件锁存,测量并补偿了每个从站之间的传播延迟。
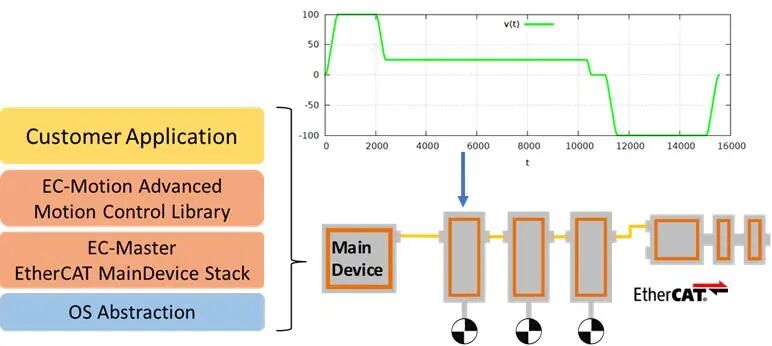
在使用acontisEC-Master这类成熟的EtherCAT主站协议栈时,我们可以启用DC同步功能,确保所有40+个伺服驱动器虽然接收数据的时间不同,但都在同一绝对时刻(Sync0信号触发)执行动作。
2、分帧处理 (Split Frame Processing)
针对人形机器人极高的数据吞吐量,EC-Master支持分帧处理技术。它允许在一个周期内分批次发送指令和接收反馈,最大化利用带宽,从而在极短的循环周期(Cycle Time)内容纳更多的轴,同时将抖动控制在微秒级别。
三、架构革新:从“硬件板卡”到“软件运控”
传统方案往往依赖专用的运动控制卡(ASIC/FPGA)来处理复杂的轨迹运算,但这增加了硬件成本和体积,不利于人形机器人的紧凑设计。目前的趋势是向Soft Motion(软件运动控制) 转型。
1、CiA402 驱动标准化
利用EC-Motion这样的软件运动控制库,开发者可以直接在通用的嵌入式处理器(如NVIDIA Jetson, Intel x86, ARM)上运行运动控制算法,通过EtherCAT总线直接指挥支持CiA402 配置的伺服驱动器。
2、轨迹生成与平滑算法
在人形机器人的平衡控制中,动作的平滑性至关重要。EC-Motion内置了轨迹生成器(Trajectory Generator),支持以下两种核心模式:
- CSP (Cyclic Synchronous Position):循环同步位置模式,适合高精度的路径跟随。
- CSV (Cyclic Synchronous Velocity):循环同步速度模式,常用于动态平衡调整。
更重要的是,软件库可以基于设定的动力学参数(速度、加速度、减速度),尤其是针对急动程度进行限制,自动计算出平滑的运动曲线(Motion Profiles)。这能有效减少机械冲击,延长减速机寿命,并让机器人的动作看起来更像“人”。
总结
从工程实践来看,“实时操作系统 + 优化的EtherCAT主站栈 + 软件运动控制库” 的架构,是目前人形机器人解决多轴同步问题的最优解之一。
它不仅简化了电气架构(一根网线串联所有关节),更重要的是将控制权完全收归于主控制器,让上层的AI算法(大脑)与底层的运动执行(小脑)能够在一个统一的、实时的神经网格中高效协同。
- 阿里云灵骏真武M890超节点实例现已开放邀测
- 简化工业组网|GW 串口服务器对接智嵌云,串口数据云端统一管理
- 艾德克斯分享WAIC 2026世界人工智能大会观察
- 升级!艾感科技推出80L亚克力密封腔体测试系统,320通道并行测试
- 工业串口组网,一台RG3308B32搞定32路串口集中采集
- STM32+WT2003Hx MP3语音芯片UART控制完整工程
- 解锁云知声U2大模型的星辰大海
- 地铁杂散电流监测中ISO系列信号隔离器的应用
- 芯朋微电子推出全平台SiC电机半桥驱动智能功率模块
- 安森美“亮剑”慕尼黑上海电子展,“AIDC”与汽车电子成“重头戏”
- 智能马桶自动开盖雷达感应方案设计
- 鸿道深度参编《中国工业控制产业发展白皮书》,以鸿道操作系统赋能产业智能化升级
- 康谋业务全景速览|自动驾驶仿真、数据闭环、机器人与院校实训一站式方案!
- 香港高校学子赴宁夏开启内地实习之旅
- 变频器的矢量控制技术应用
- 高通全面发布数据中心AI基础设施战略