开疆智能Ethernet转ModbusTCP网关连接发那科机器人与三菱PLC配置案例
本案例是三菱FX5U PLC通过ethernet/IP转ModbusTCP网关对发那科机器人进行控制的配置案例。
PLC端主要配置
以太网端口设置
在通信测试中,PLC作为主站,在PLC设置中选择“以太网端口”非常关键,以确保通信测试的正常进行。
1、首先,在PLC设置中,选择“以太网端口”选项。
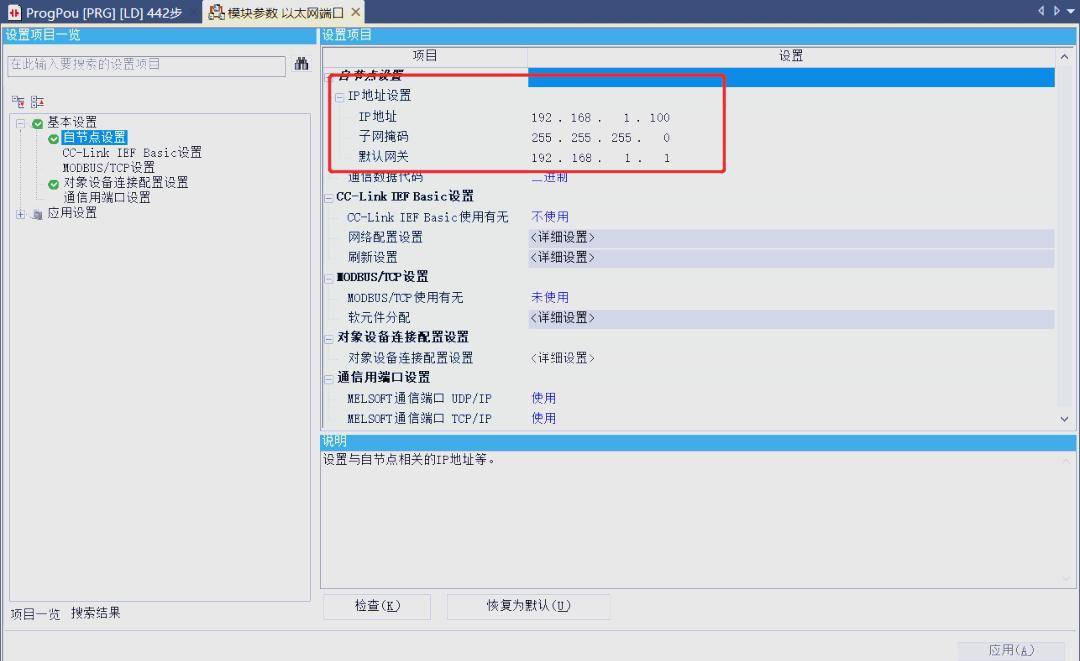
IP及网络配置
接下来,进行IP地址、子网掩码及默认网关的配置,以确保通信的准确性与稳定性。
2、接下来,在PLC设置中,配置主站的IP地址为192.168.1.100,子网掩码设置为255.255.2550,并指定默认网关为192.168.1.1。
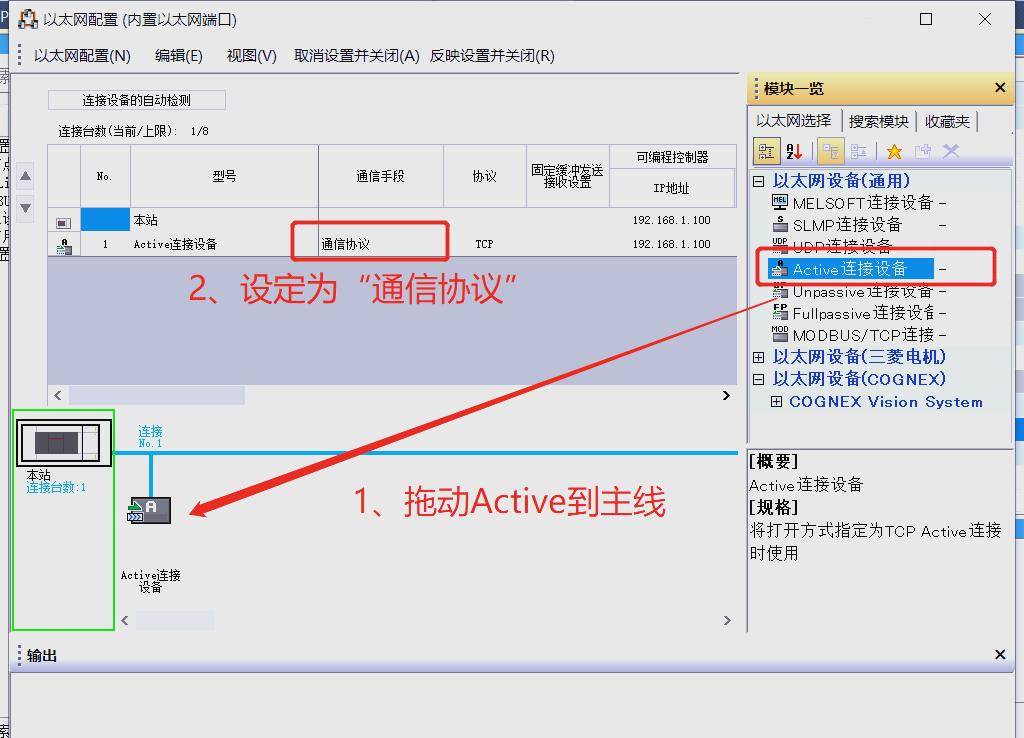
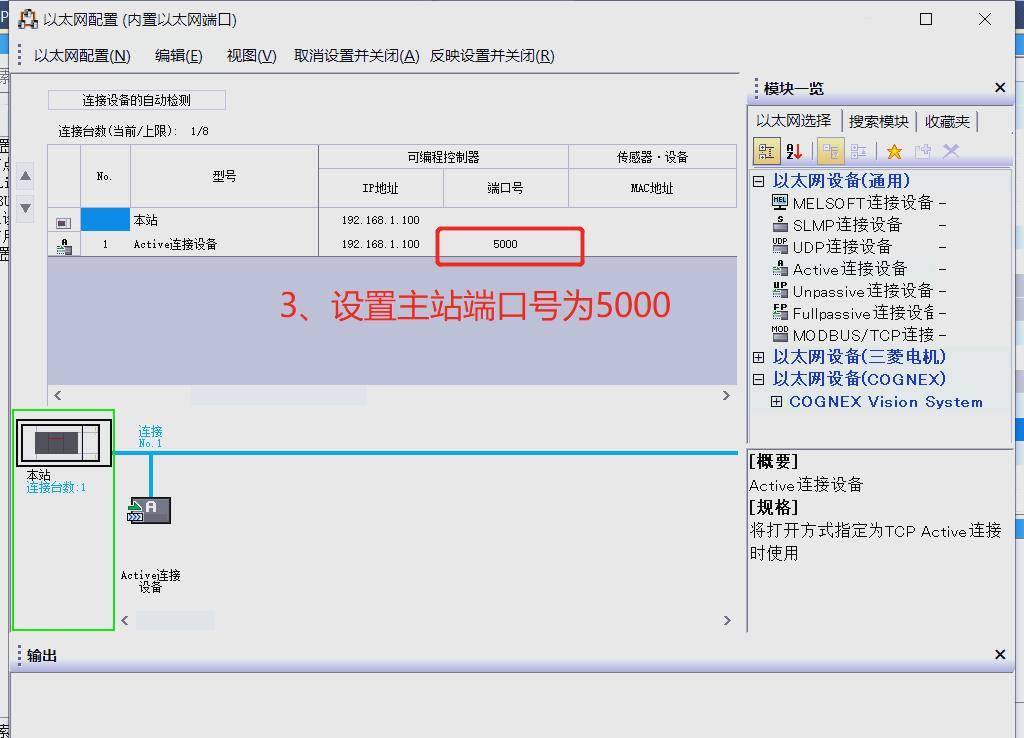
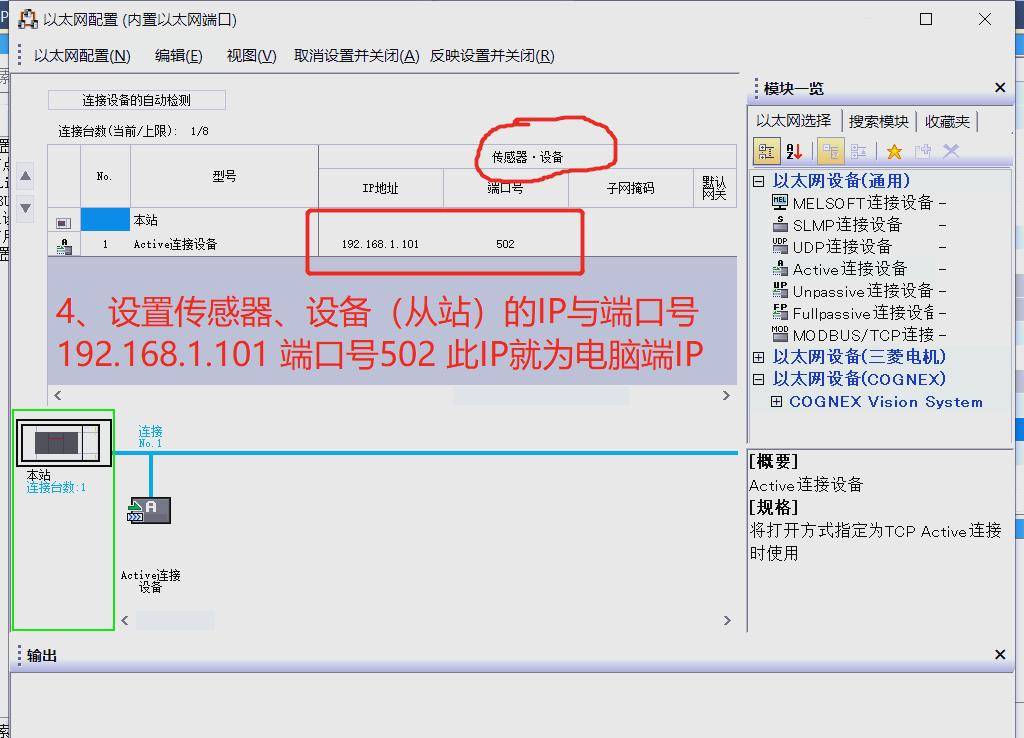
3、进行对象设备的连接配置。
4、在GX Works3软件中,找到并点击“工具”选项,然后选择“通信协议支持功能”进行设置,以确保三菱PLC能够正常支持通讯协议。
关键提示:在执行上述步骤时,请确保PLC与计算机的连接状态保持稳定,否则配置写入过程中可能会出现异常情况。
将组态下载进PLC
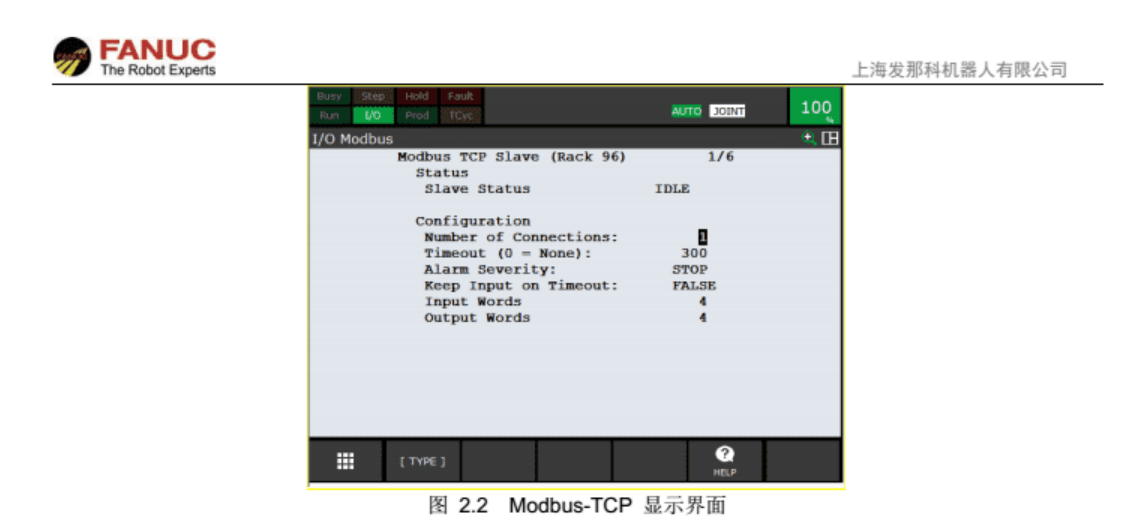
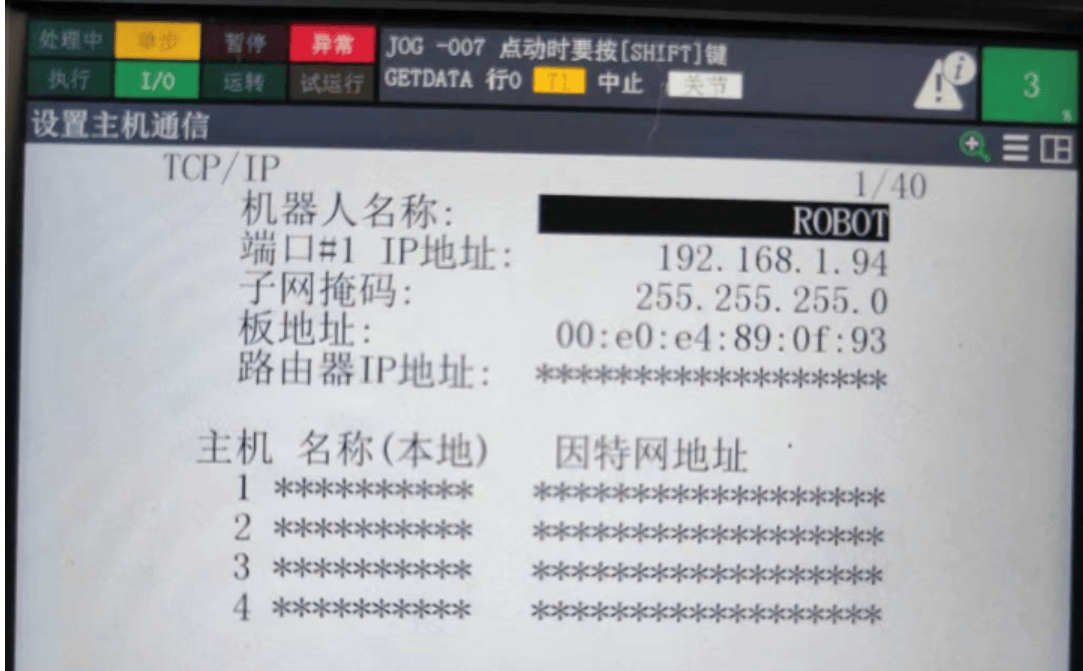
设置发那科机器人的TCP设置

设置TCP参数
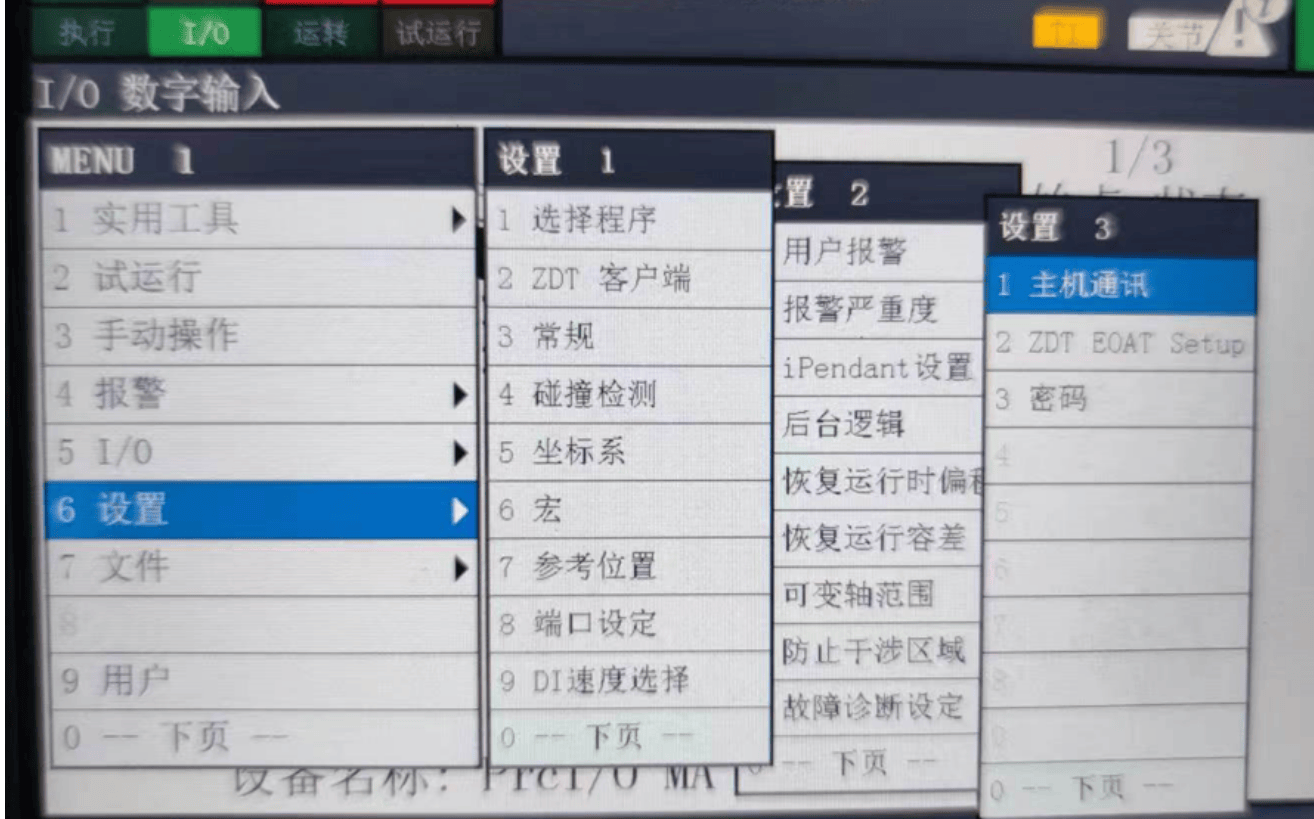
设置机器人的IP地址
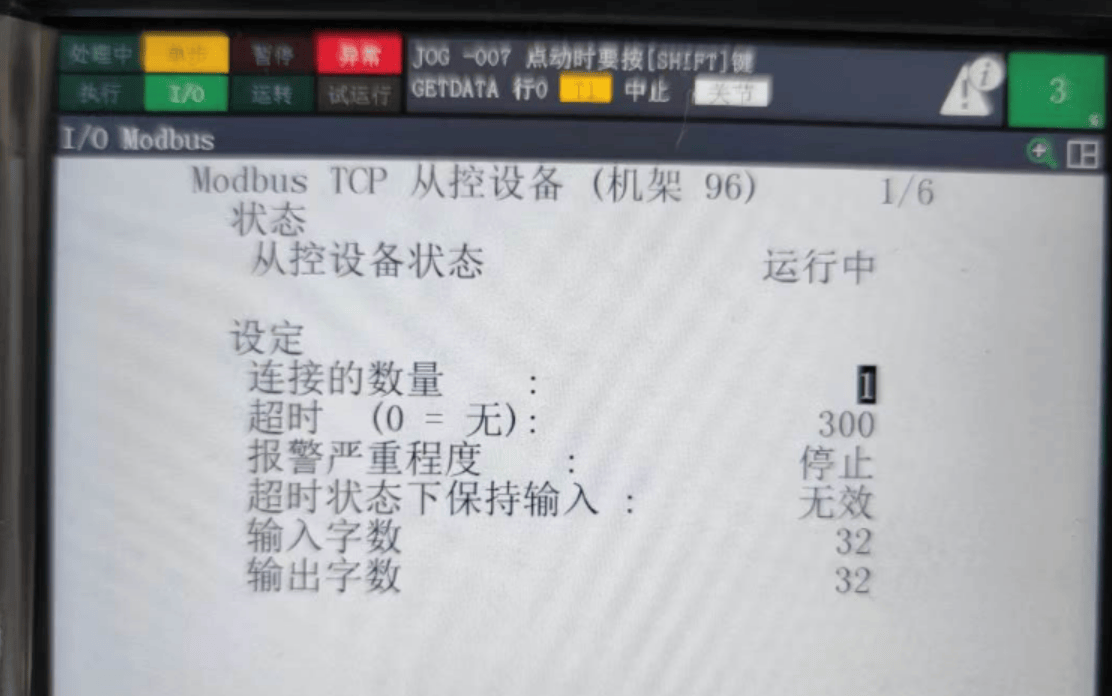
设置连接数与输入输出数据长度
分配好机器人的IO点数
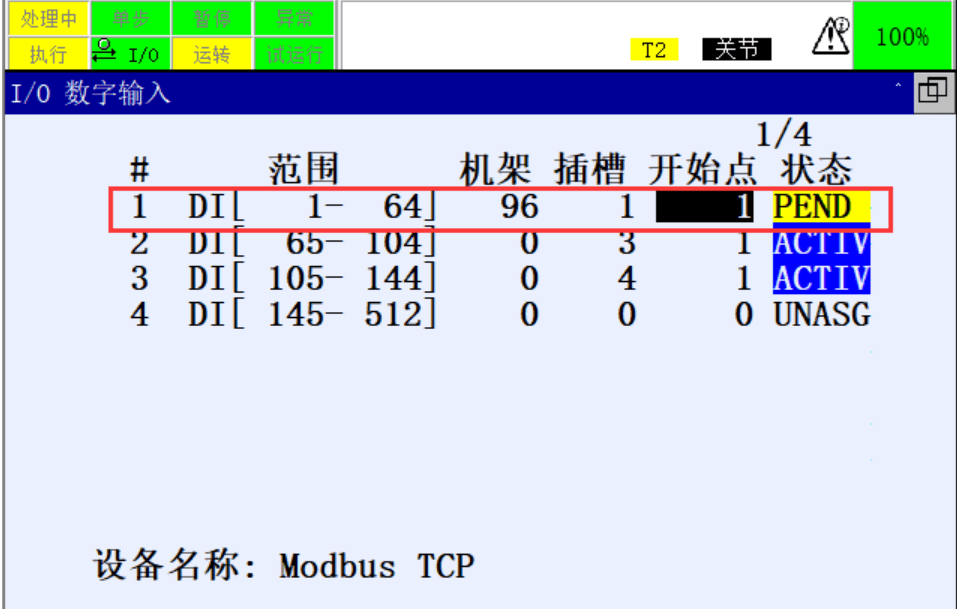
完成后将机器人重启使配置生效。
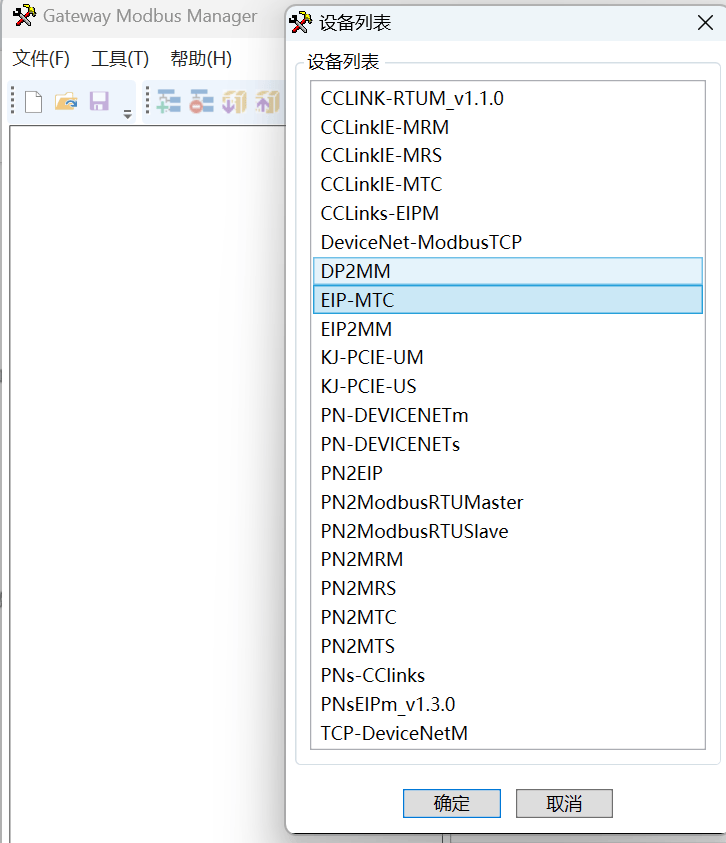
网关配置
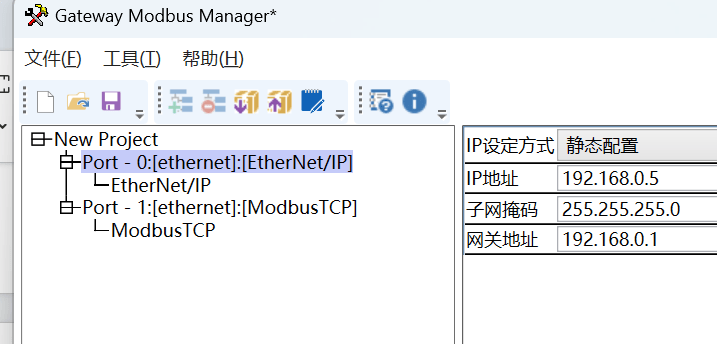
打开网关配置软件“Gateway Configuration Studio”并新建项目
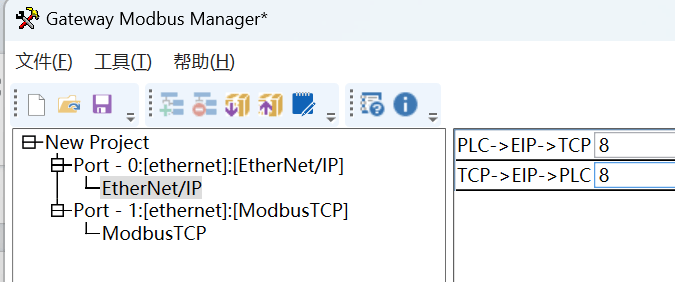
设置网关在Ethernet/IP的IP地址与输入输出数据长度。(IP地址与三菱PLC分配的地址保持一致)
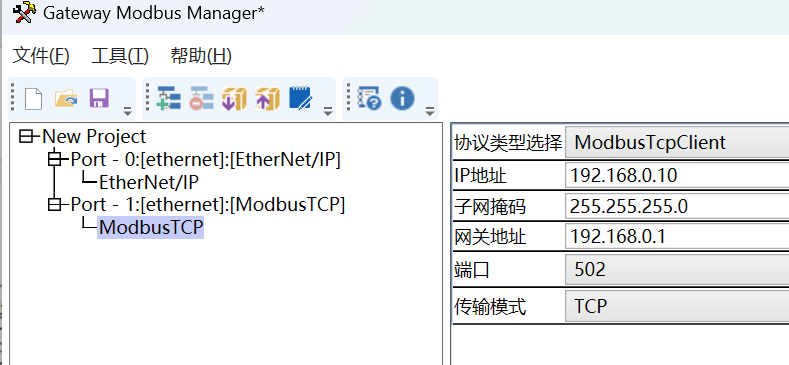
设置网关作为ModbusTCP客户端的IP地址,可与Ethernet不同网段。
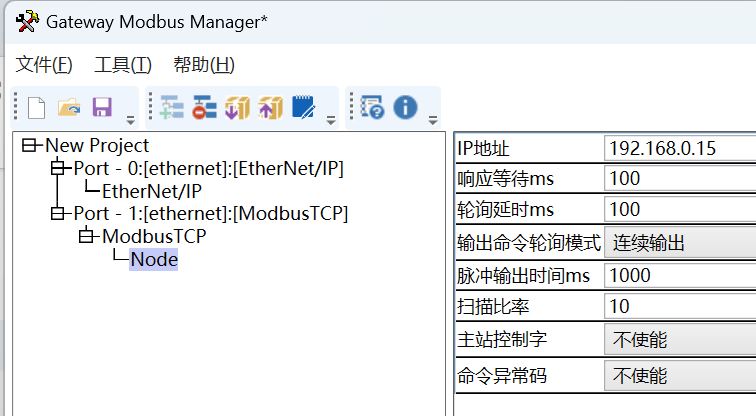
添加从站(发那科机器人)的IP地址
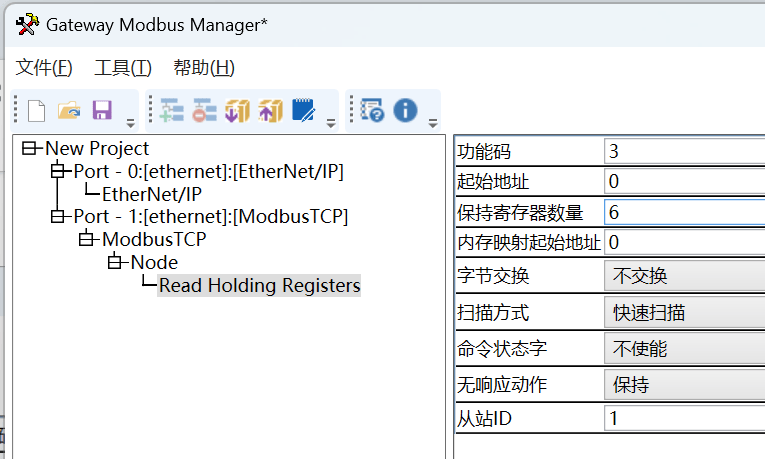
添加所需要功能码,可根据电能表手册进行设置。
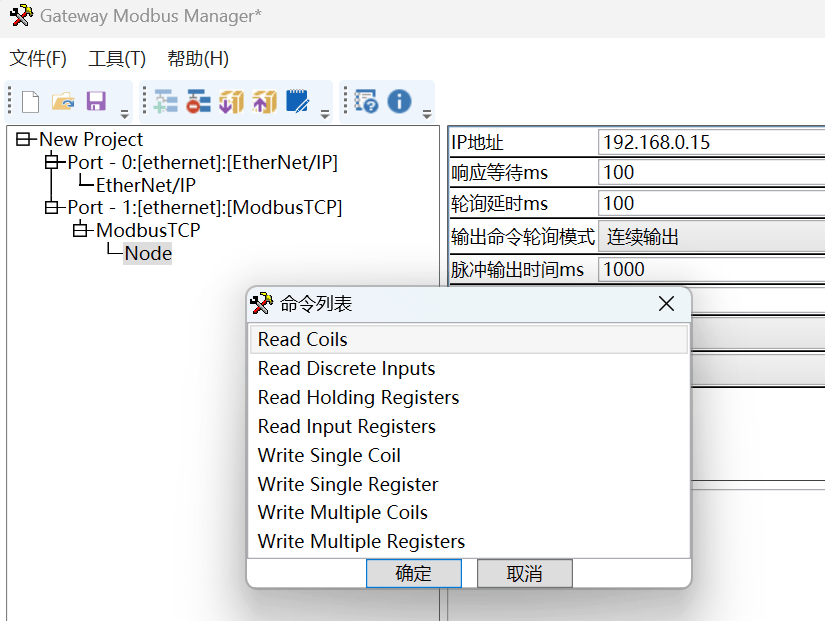
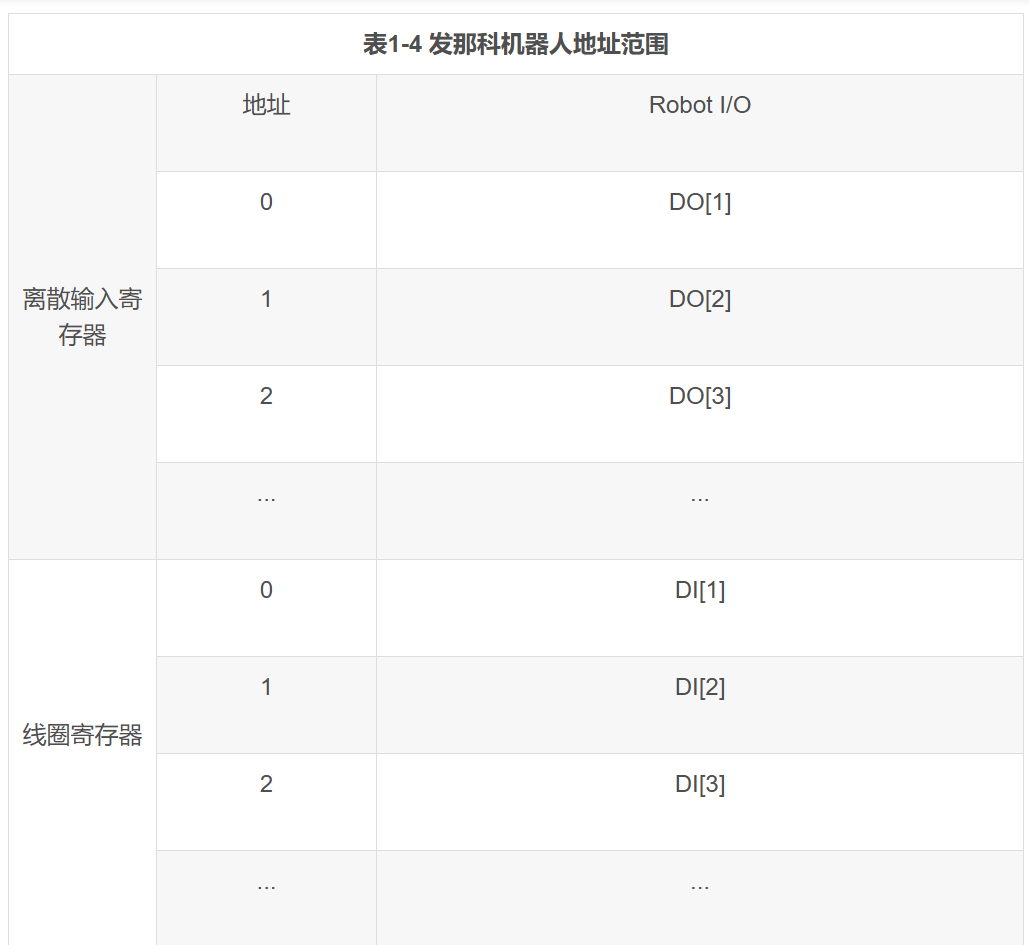
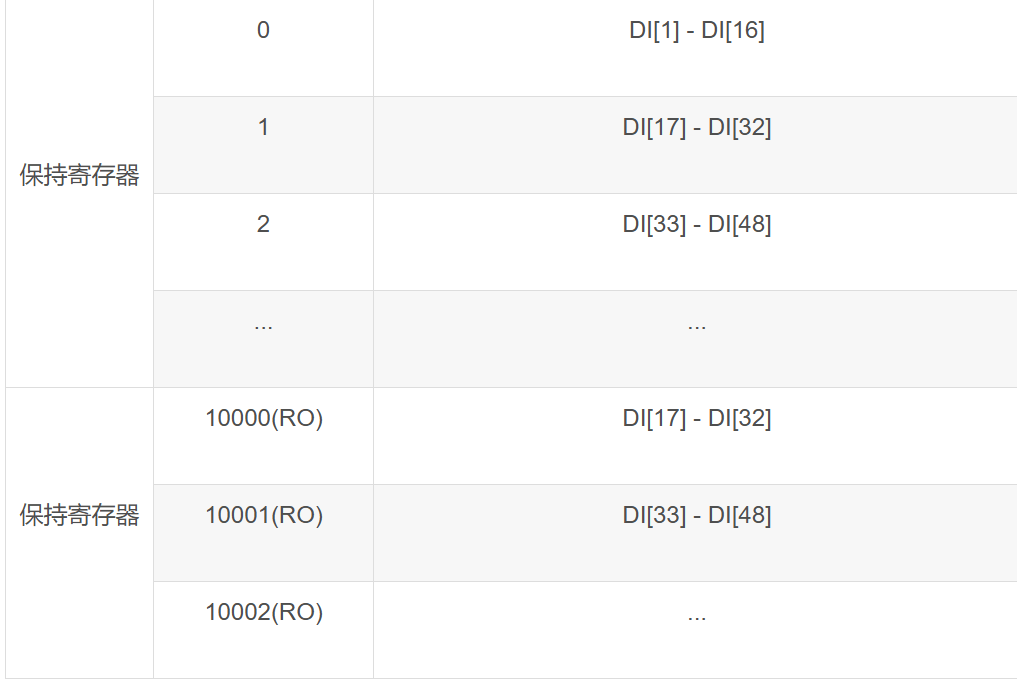
从手册得知机器人支持01/02/03功能码进行读取
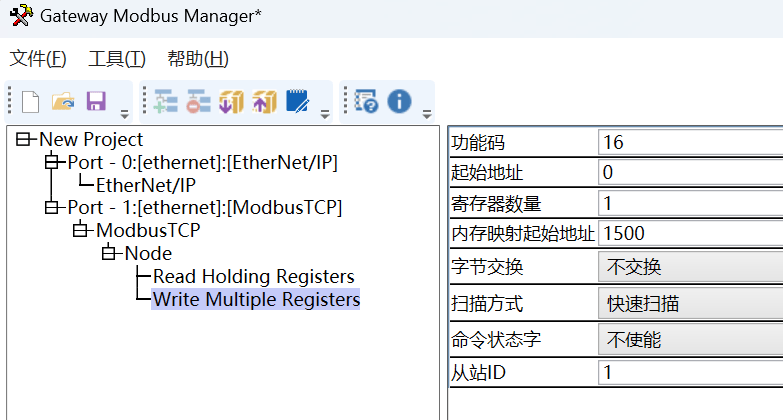
设置为03与16功能码,填写对应寄存器地址与寄存器数量。
如图所示,地址从0开始读取6个寄存器写一个寄存器
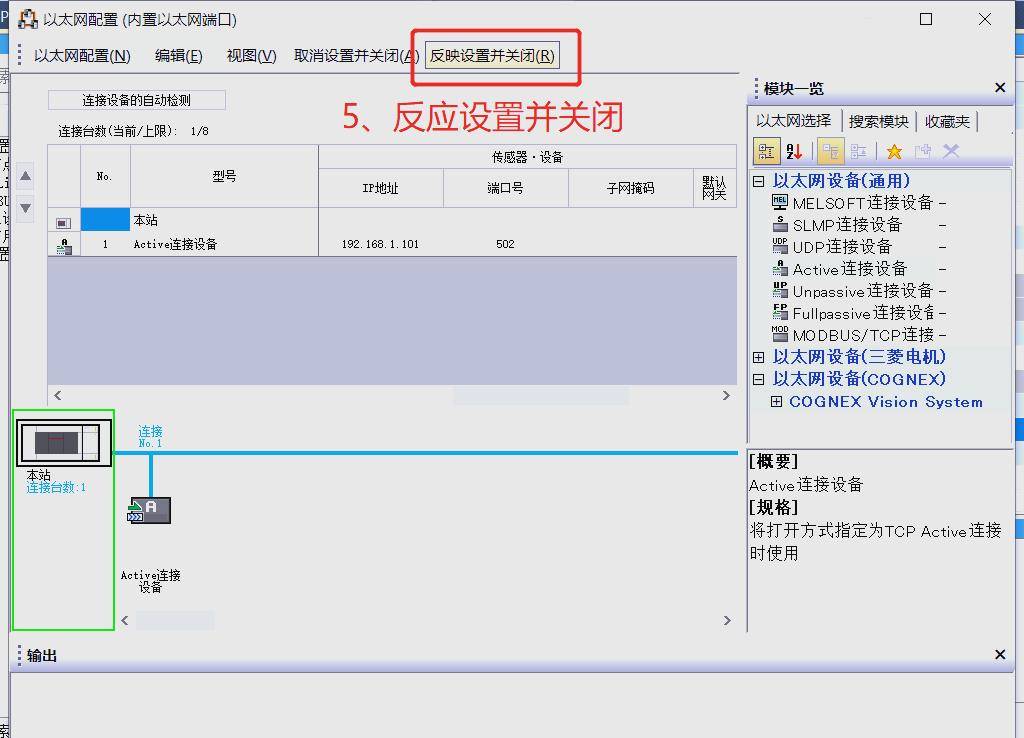
将配置下载进入网关即可正常进行通讯。
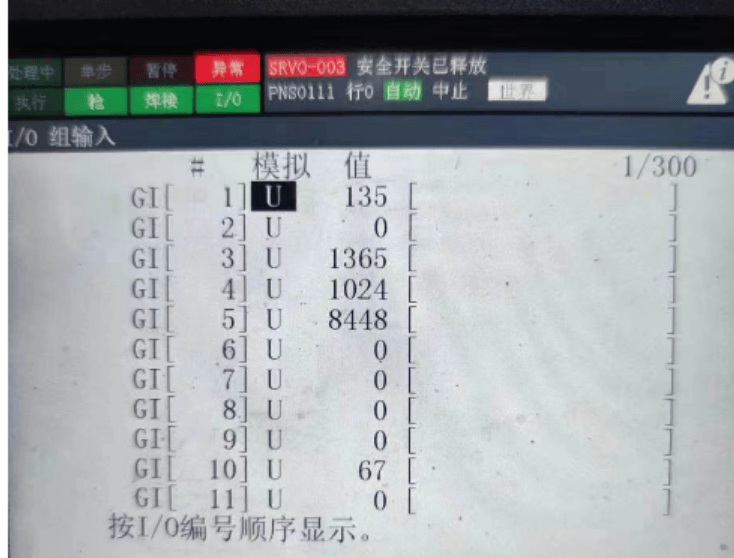
PLC给值后即可在机器人一侧读取到。
审核编辑 黄宇
- 封切热收缩包装机PLC数据采集解决方案
- AI销量暴增2.8倍,高通CEO断言将比肩智能手机
- 智能手表内部寸土寸金,板对板射频跳线该选SMB还是MMCX?
- 新能效国标实施,两个对智能家居值得关注的指标
- 铠侠目标AI数据中心占60%,为KV 缓存、检索增强生成(RAG)、超大容量研发最新闪存和SSD技术
- 【场景案例】阿普奇IPC330D-H81在纺织布匹表面检测中的客户案例实践
- ProfiNet转CCLINK IEFB协议转换解决水泥配料生产线双PLC数据互通问题
- NVIDIA正式发布工厂运营蓝图
- NVIDIA评定EC-Master为优先方案:打通物理AI硬实时控制
- “第八届MEMS智能传感器产业生态发展大会”成功举办
- 信捷 PLC 编程口复用不改触摸屏连接使用串口转以太网模块实现纺织产线数据双通道应用案例
- 工业设备语音提示芯片选型怎么做才能兼顾可靠与灵活?
- 2026新政解读:智能体与AI终端的“双向奔赴”,AIoT产业迎来三大价值重构
- 安森美为区域控制架构构筑坚实技术底座
- 工业机器人关节连接技术升级,TNC射频连接器会被推入锁紧结构取代吗
- 骁锐科技获实用新型专利:一种便于更换的水温传感器