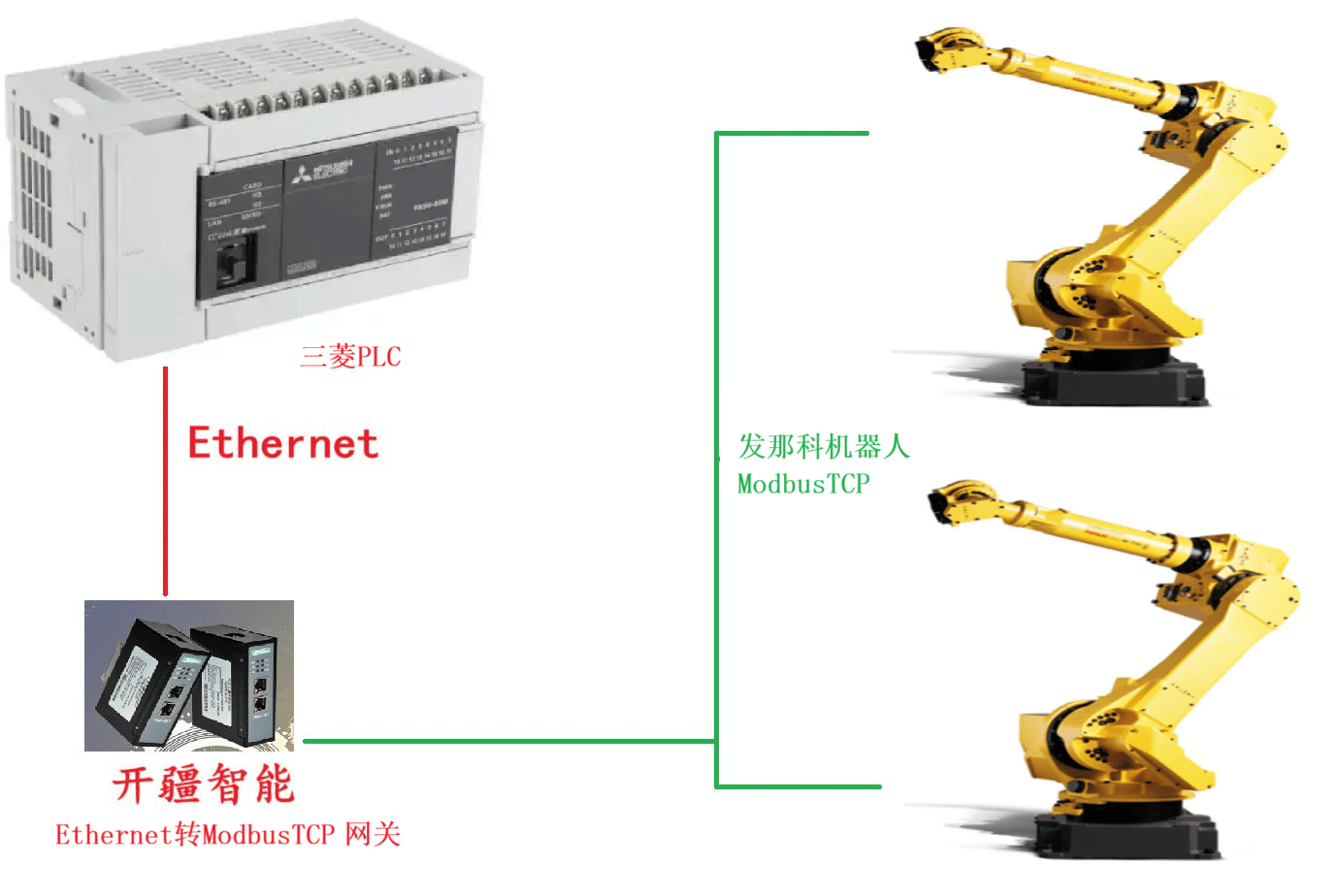
开疆智能Ethernet转ModbusTCP网关连接发那科机器人与三菱PLC配置案例
本案例是三菱FX5U PLC通过ethernet/IP转ModbusTCP网关对发那科机器人进行控制的配置案例。
PLC端主要配置
以太网端口设置
在通信测试中,PLC作为主站,在PLC设置中选择“以太网端口”非常关键,以确保通信测试的正常进行。
1、首先,在PLC设置中,选择“以太网端口”选项。
IP及网络配置
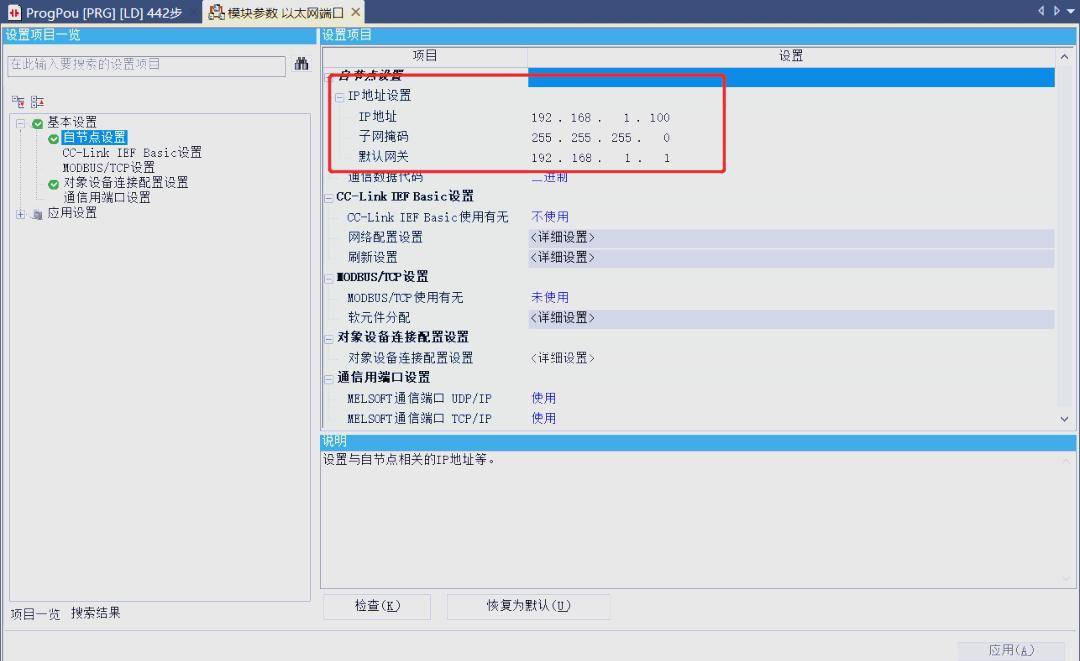
接下来,进行IP地址、子网掩码及默认网关的配置,以确保通信的准确性与稳定性。
2、接下来,在PLC设置中,配置主站的IP地址为192.168.1.100,子网掩码设置为255.255.2550,并指定默认网关为192.168.1.1。
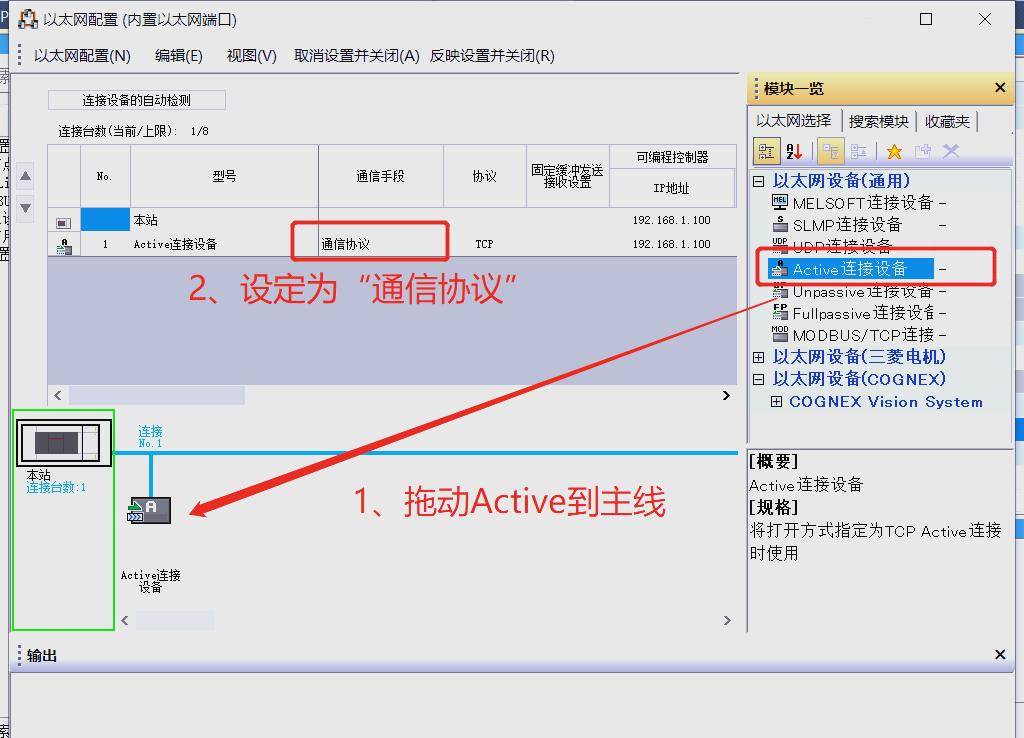
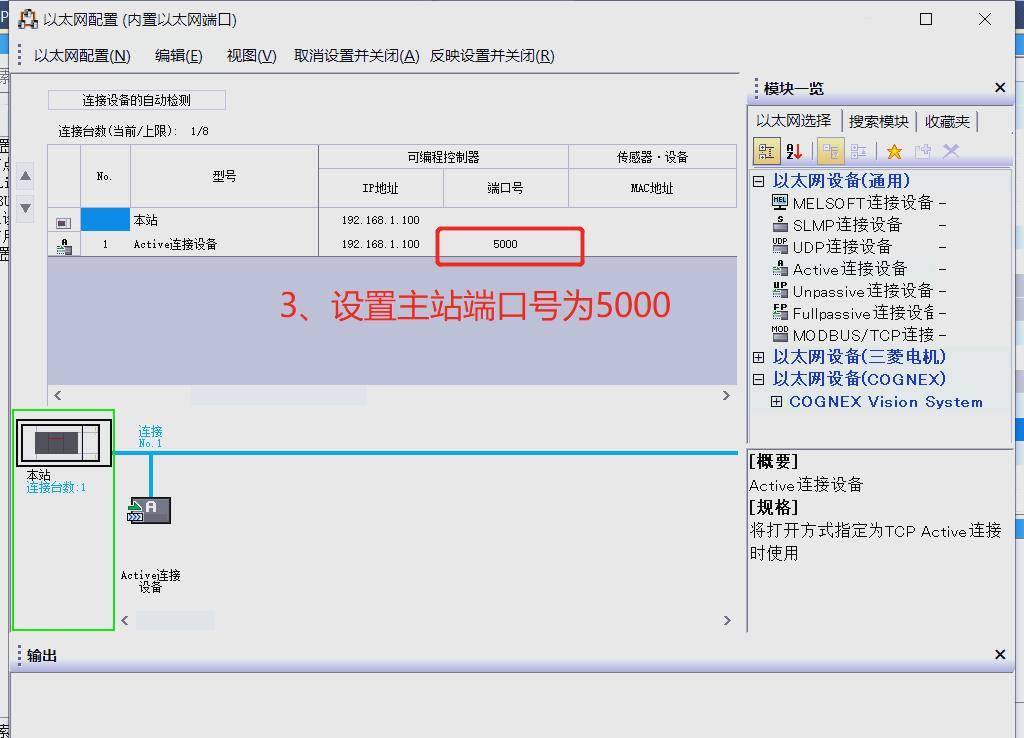
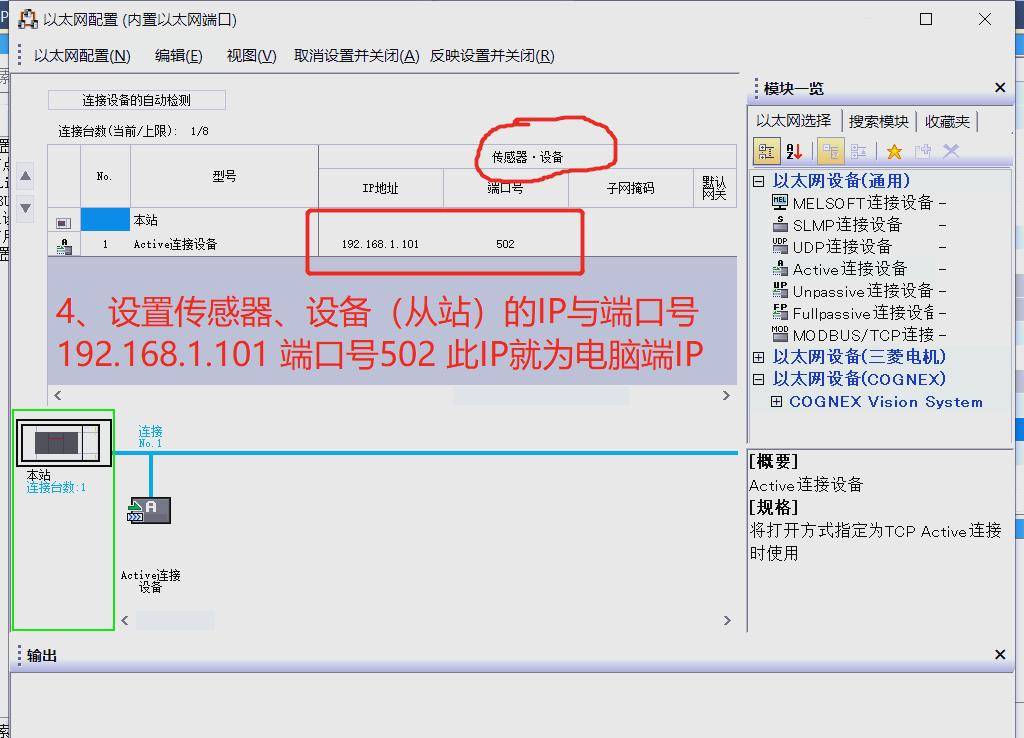
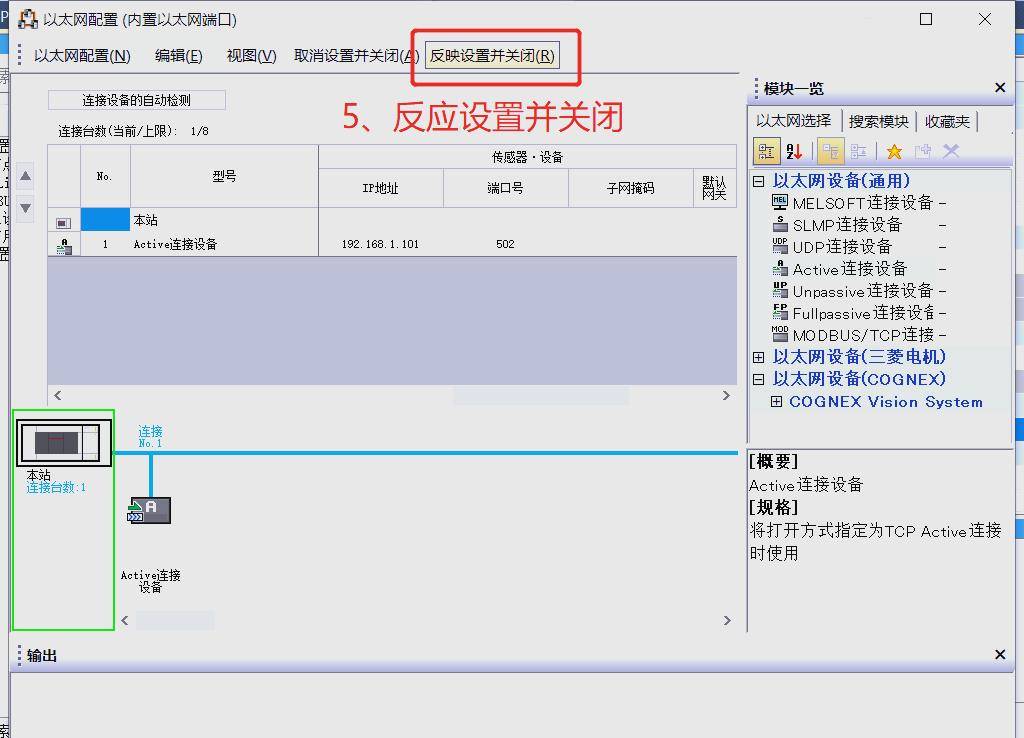
3、进行对象设备的连接配置。
4、在GX Works3软件中,找到并点击“工具”选项,然后选择“通信协议支持功能”进行设置,以确保三菱PLC能够正常支持通讯协议。
关键提示:在执行上述步骤时,请确保PLC与计算机的连接状态保持稳定,否则配置写入过程中可能会出现异常情况。
将组态下载进PLC
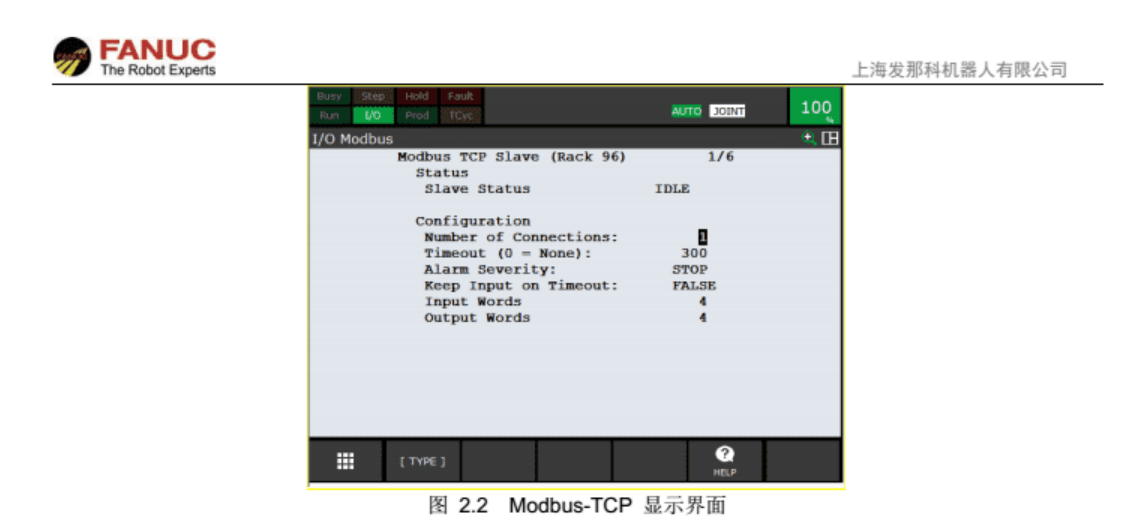
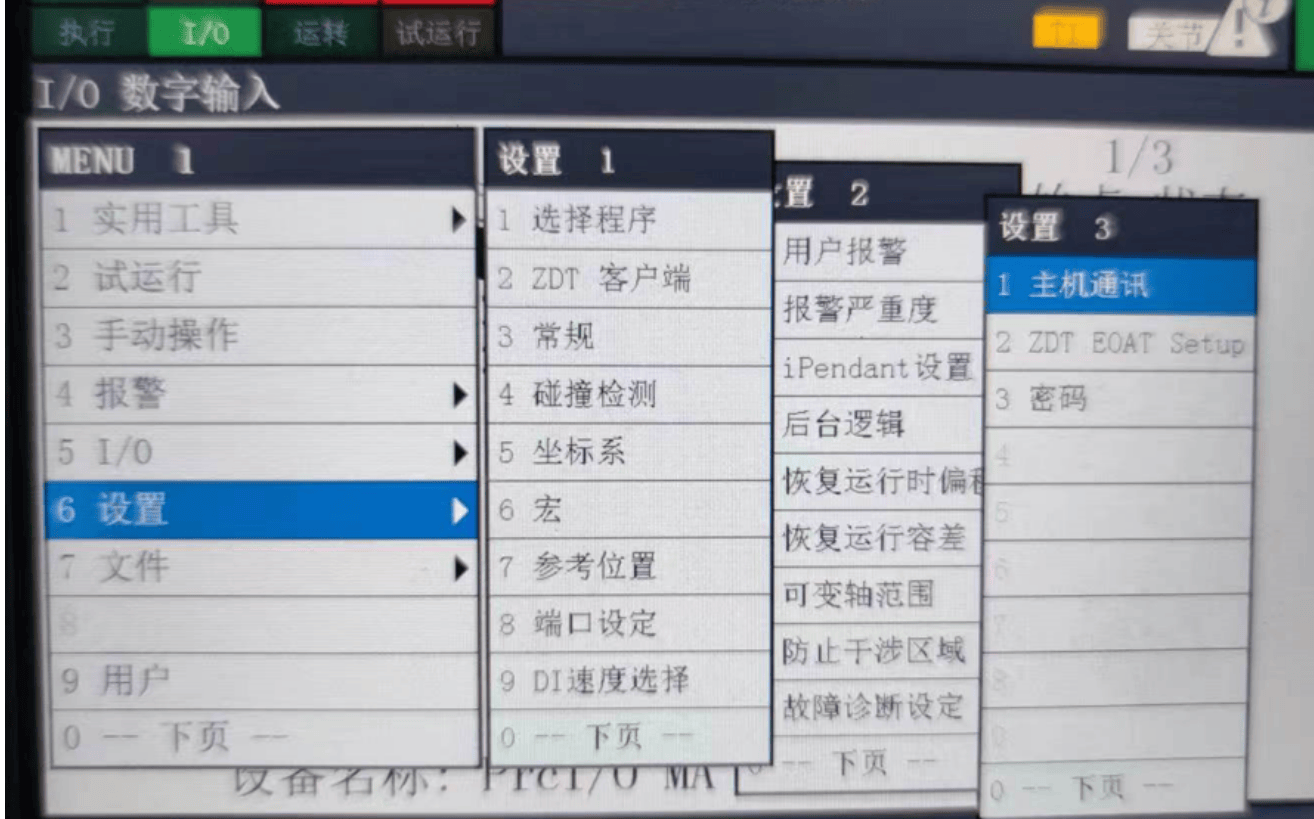
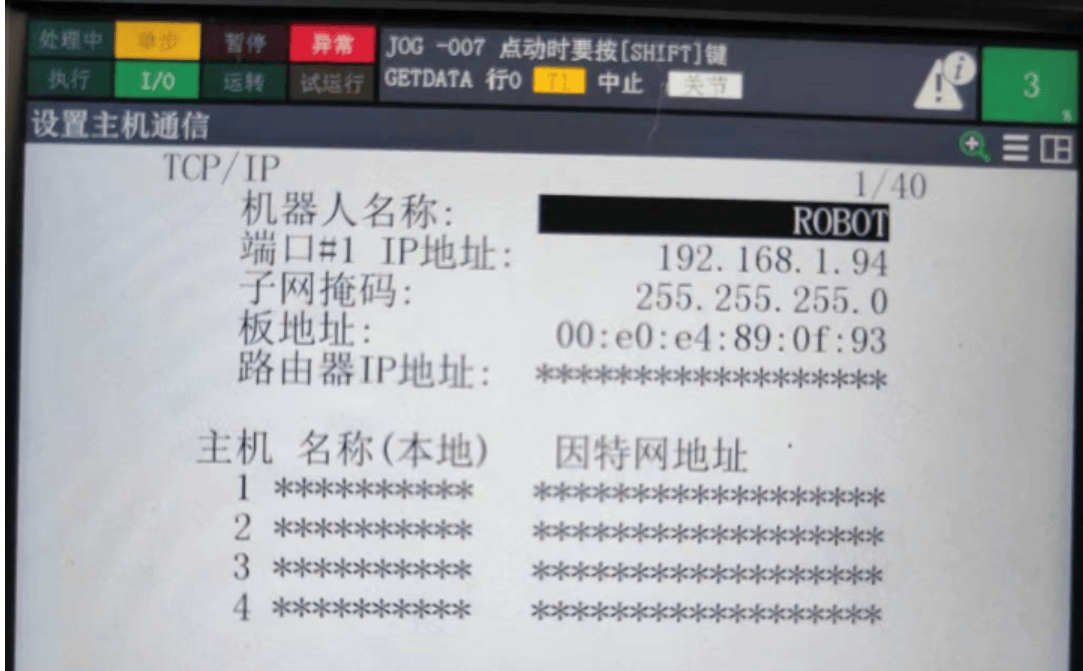
设置发那科机器人的TCP设置

设置TCP参数
设置机器人的IP地址
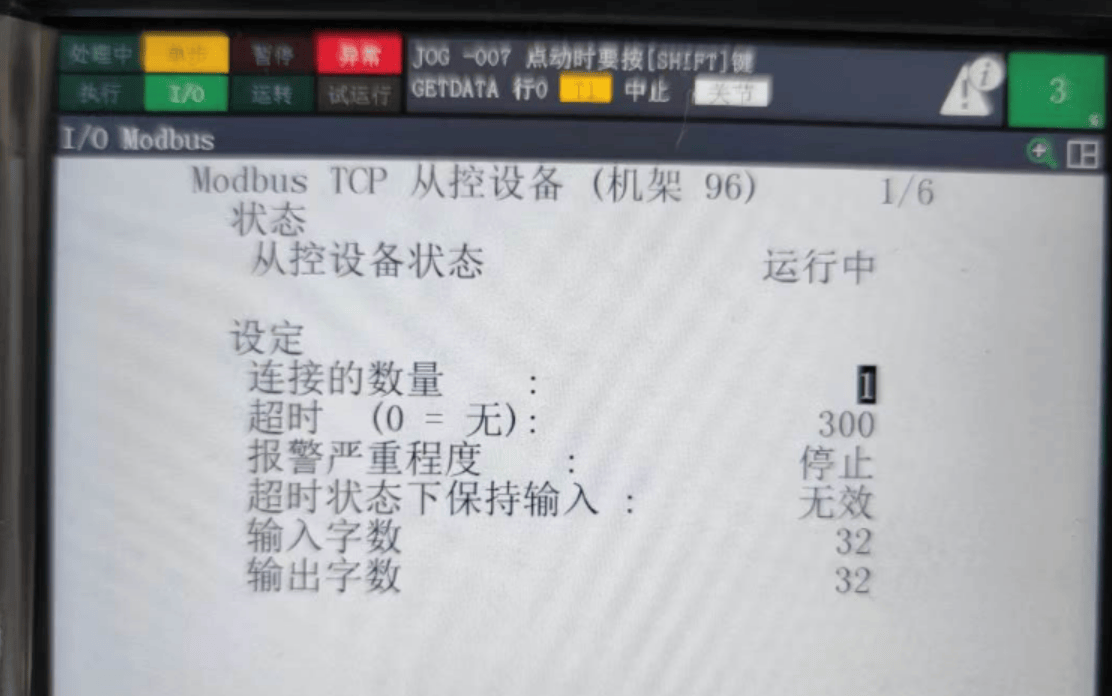
设置连接数与输入输出数据长度
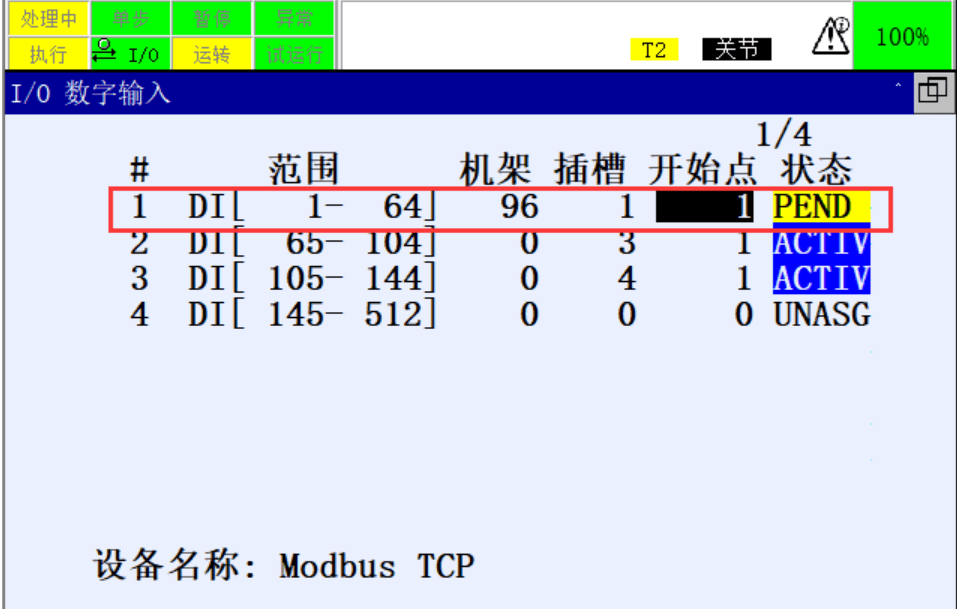
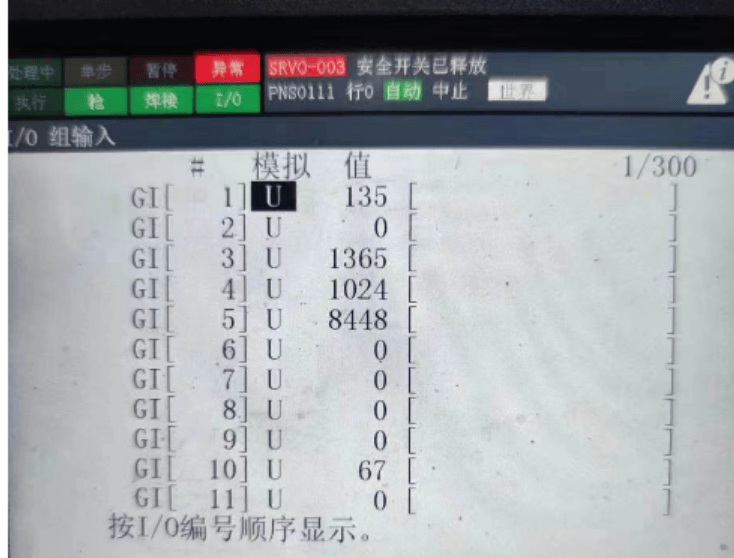
分配好机器人的IO点数
完成后将机器人重启使配置生效。
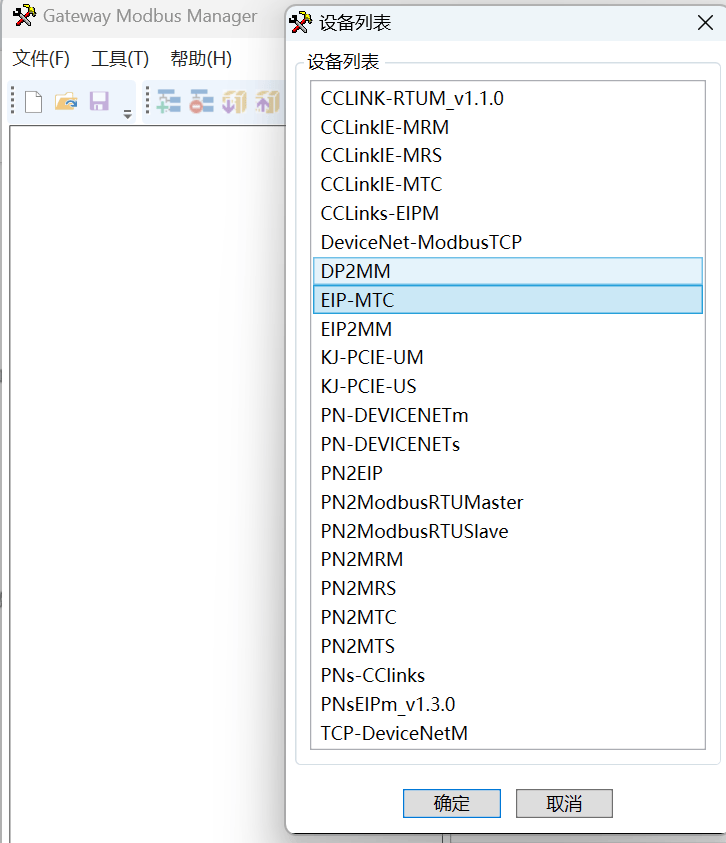
网关配置
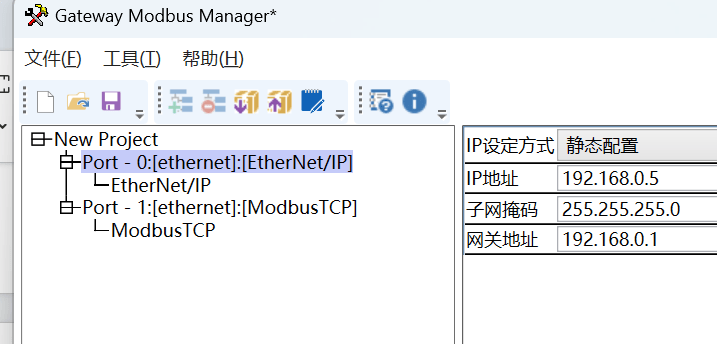
打开网关配置软件“Gateway Configuration Studio”并新建项目
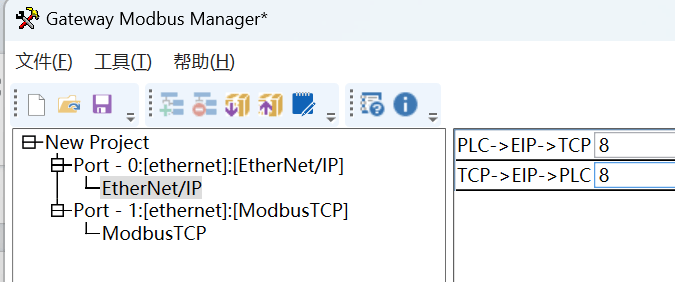
设置网关在Ethernet/IP的IP地址与输入输出数据长度。(IP地址与三菱PLC分配的地址保持一致)
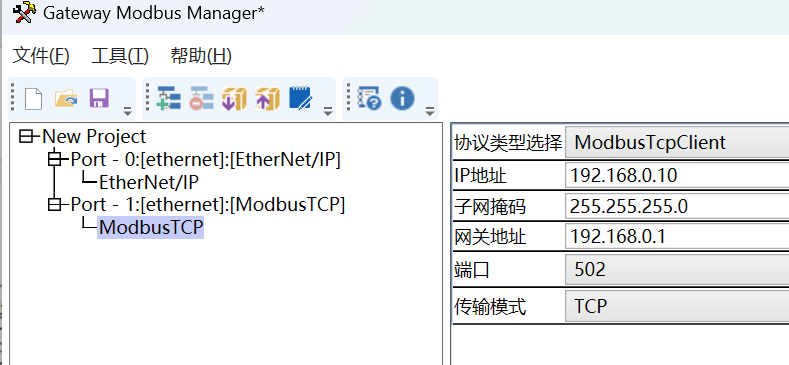
设置网关作为ModbusTCP客户端的IP地址,可与Ethernet不同网段。
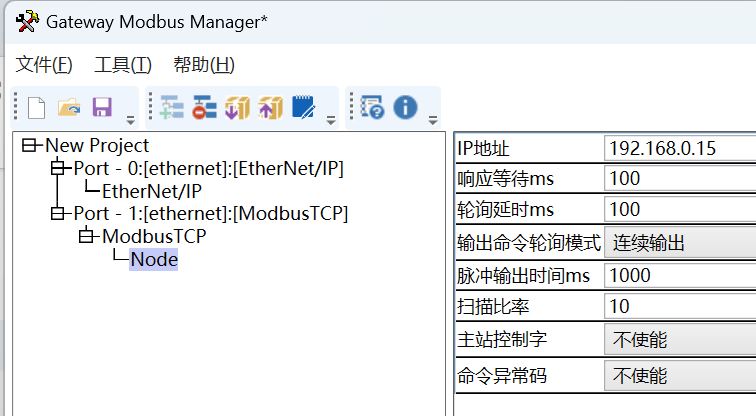
添加从站(发那科机器人)的IP地址
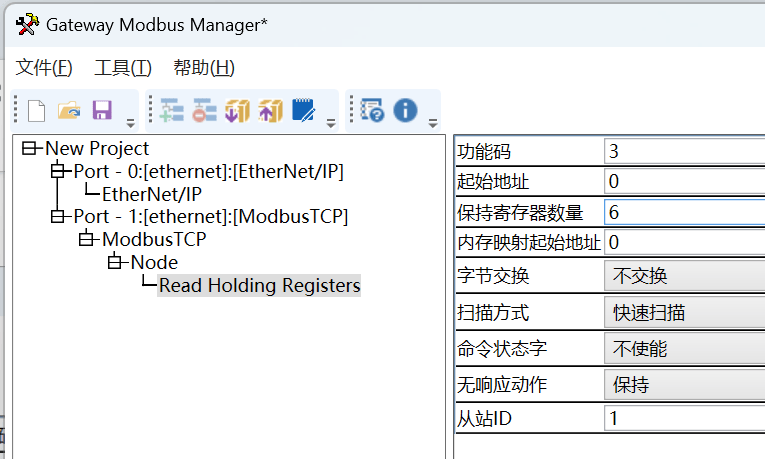
添加所需要功能码,可根据电能表手册进行设置。
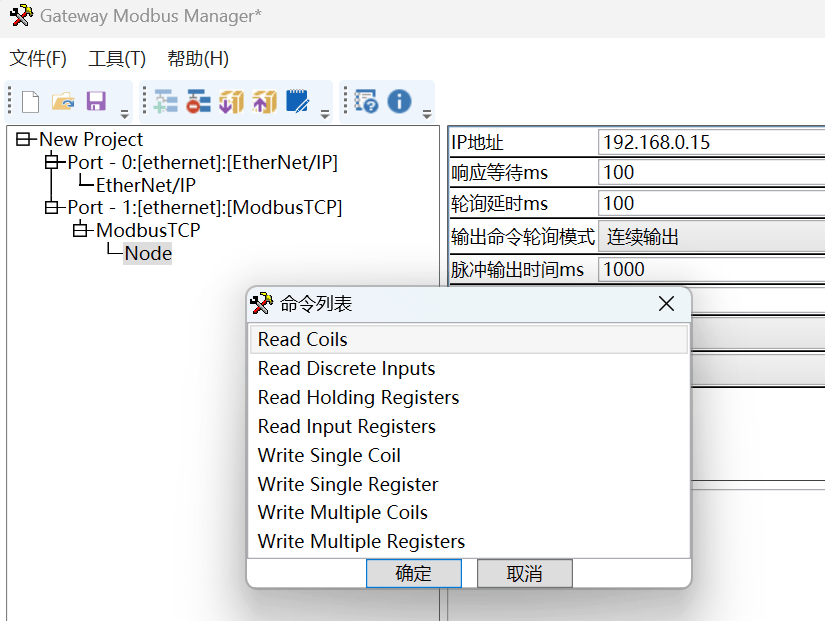
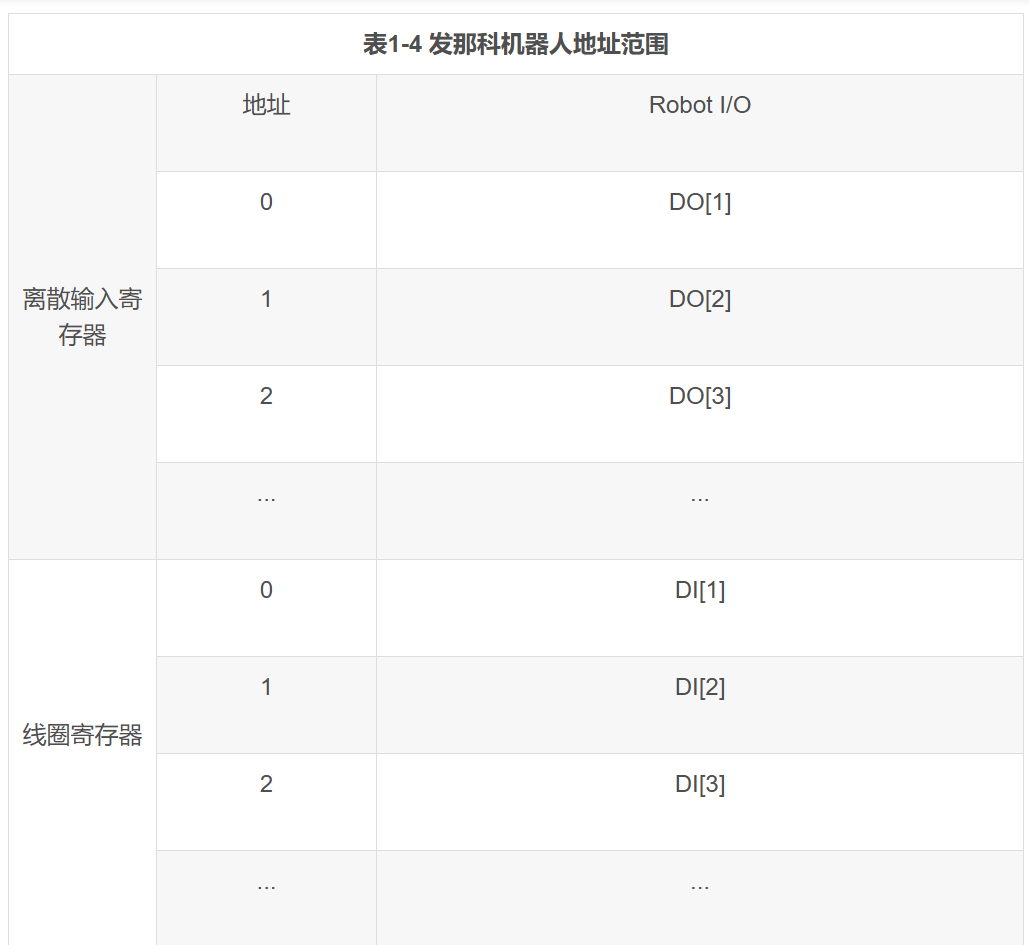
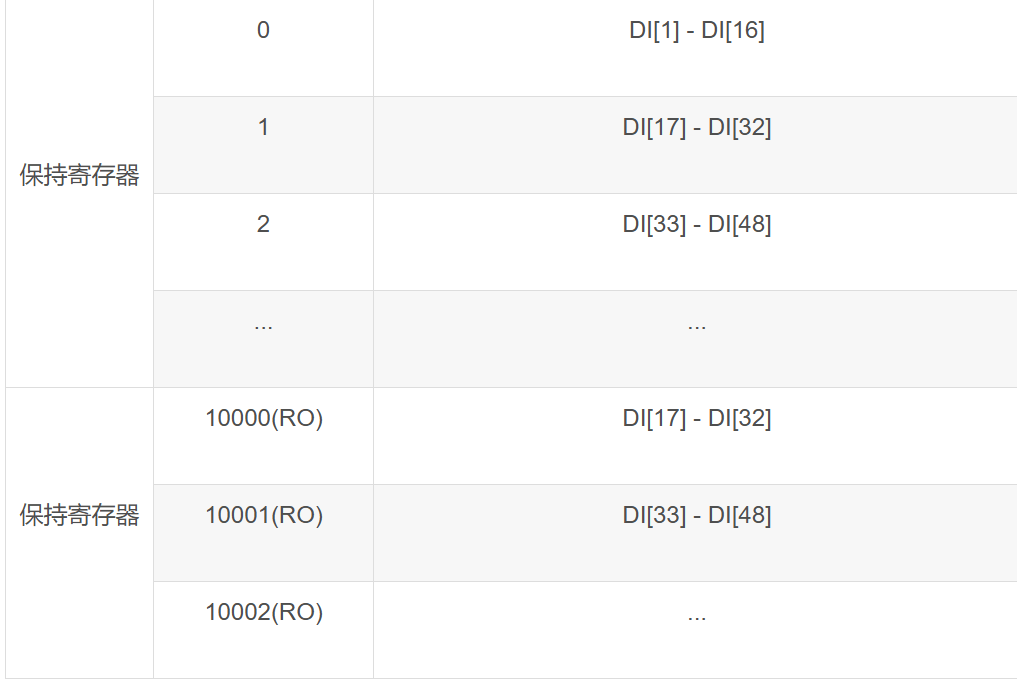
从手册得知机器人支持01/02/03功能码进行读取
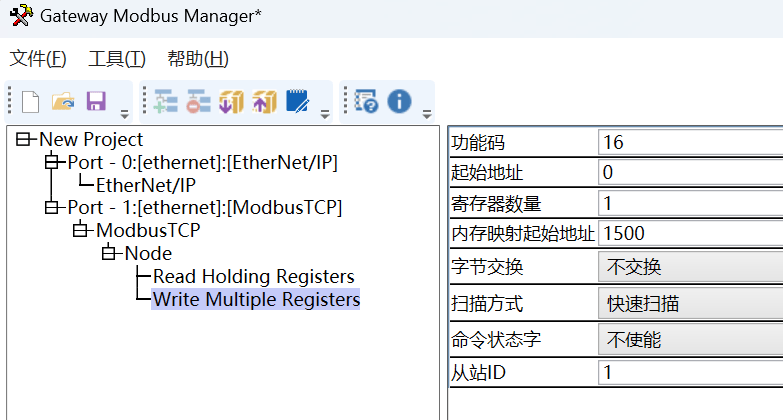
设置为03与16功能码,填写对应寄存器地址与寄存器数量。
如图所示,地址从0开始读取6个寄存器写一个寄存器
将配置下载进入网关即可正常进行通讯。
PLC给值后即可在机器人一侧读取到。
审核编辑 黄宇
- 图扑数字孪生静态交通一网统管 | 智慧停车场合集
- 【有资料】开源CW32L011电机驱动器,硬件支持FOC
- ZWS云平台:储能经销商和终端业主的智能助手
- 倾佳电子代理的基本半导体驱动IC及电源IC产品力深度解析报告
- 东芝亮相2025上海国际电力元件和可再生能源管理展览会
- 推拉力测试机测试模块选择,看完选择不迷茫
- 加氢站和电力系统,谁是AEM产业化破局的关键?
- 翼辉软PLC方案的技术创新与实践
- AI安防选什么主板?杰和IB3-761靠“算力精准+多接口”出圈
- 信捷XS STUDIO编程软件V2.3.2版本的全新功能
- 诚迈科技与理想汽车签署合作备忘录,携手共建理想星环OS开源生态
- 光通信测试领域的精准利器:Agilent N7768A 多端口光开关解析
- 中国最大传感器公司,进入英伟达供应链!
- 金升阳LD20-26BxxR2系列AC/DC电源产品优势
- 基于仿生蒲公英等温放大系统的无线细胞传感器及其对循环肿瘤细胞的超灵敏检测
- 决定自动驾驶摄像头质量的因素有哪些?